
- 105
- 1 427 942
ReM-RC
Lithuania
Приєднався 25 вер 2006
RC models, electronics, robotics, programming.
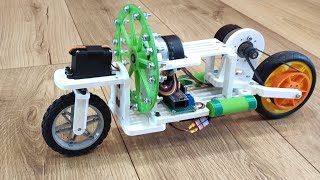
I tried to make my self balancing cube better
I tried to make my cube balance better. I also redesigned it to make it easier to assemble.
ESP32 controller,
MPU6050 sensor,
three Nidec 24H brushless motors,
450-500 mAh 3S1P LiPo battery.
Cube frame is 3D printed.
This project is open source:
github.com/remrc
3D print files
www.thingiverse.com/remrc
Instagram remrc
ESP32 controller,
MPU6050 sensor,
three Nidec 24H brushless motors,
450-500 mAh 3S1P LiPo battery.
Cube frame is 3D printed.
This project is open source:
github.com/remrc
3D print files
www.thingiverse.com/remrc
Instagram remrc
Переглядів: 3 522
Відео


RC self balancing bike with EDF engine
Переглядів 9696 місяців тому
ESP32, SimpleFOCMini drivers, MPU6050, MT6701 magnetic encoders, GBM2804H-100T motors, 30mm 6 Blades EDF, 12A BLDC controller (ESC for EDF), 1000 mAh 3S1P battery. Remote control by phone. Instagram remrc

Drifting with a balancing robot
Переглядів 1,6 тис.7 місяців тому
ESP32, SimpleFOCMini drivers, MT6701 magnetic encoders, GBM2804H-100T motors. What will happen if omni wheels are placed on a two wheel balancing robot? I liked the result, maybe you will too... Instagram remrc

Unicycle with two reaction wheels
Переглядів 2,6 тис.7 місяців тому
ESP32 controller, MPU6050 sensor, three Nidec 24H brushless motors, 500 mAh 3S1P LiPo battery. Unicycle frame is 3D printed. If you did self balancing cube before, you can transform it to unicycle. The electronics are the same. I also made two different unicycles before: ua-cam.com/video/AV_gpJPhp-s/v-deo.html ua-cam.com/video/YOR9 x-a_Y/v-deo.html This project is open source: github.com/remrc ...

Self balancing triangle (reaction wheel)
Переглядів 5 тис.8 місяців тому
ESP32 D1 controller Simple FOC Mini BLDC driver MT6701 magnetic encoder EMAX 2806-100KV motor MPU6050 3 WS2812B leds 3S 500 mAh LiPo battery. It is an open source project: github.com/remrc/ 3D print files: www.thingiverse.com/remrc

Two wheel balancing robot and a bit of acrobatics
Переглядів 4,1 тис.10 місяців тому
I did it just to test ESP32 with SimpleFOCMini drivers and MT6701 magnetic encoders. It works very well, so I tried to make that it could stand up and roll over on its own.
Self balancing bike
Переглядів 45 тис.Рік тому
Nidec 24H motors. Arduino nano. MPU6050. TowerPro MG995 servo. 1000 mAh LiPo battery. It can be different - 500-1200 mAh. This is the same bike with omni wheel, just removed omni wheel, printed some extra parts and added servo with front wheel. It is an open source project: github.com/remrc/ 3D print files: www.thingiverse.com/remrc Bikes with gimbal controller and BLDC motor. ua-cam.com/video/...

Self balancing bike with omni wheel
Переглядів 6 тис.Рік тому
Arduino nano, MPU6050, Nidec 24H motors, LiPo 1000 mAh battery. All parts 3D printed. It is an open source project: github.com/remrc/ 3D print files: www.thingiverse.com/remrc How to print similar omni wheels ua-cam.com/video/qEYSifzOH54/v-deo.html

Balancing with propellers
Переглядів 3,2 тис.Рік тому
Some experiments in trying to balance while blowing air. ESP32C3, MPU6050, one cell LiPo battery.
Self balancing with reaction wheels (open source)
Переглядів 27 тис.Рік тому
Self balancing with reaction wheels (open source)
Reaction wheel unicycle robot with remote control
Переглядів 3,8 тис.2 роки тому
Reaction wheel unicycle robot with remote control
DIY reaction wheel bike - what inside
Переглядів 7 тис.2 роки тому
DIY reaction wheel bike - what inside
DIY two axis self balancing stick (open source)
Переглядів 6 тис.2 роки тому
DIY two axis self balancing stick (open source)
Reaction wheel cube - attempt to jump
Переглядів 4,9 тис.2 роки тому
Reaction wheel cube - attempt to jump
DIY Arduino self balancing robot with reaction wheel
Переглядів 15 тис.3 роки тому
DIY Arduino self balancing robot with reaction wheel
Self balancing in tandem (reaction wheels)
Переглядів 4,4 тис.3 роки тому
Self balancing in tandem (reaction wheels)
LEGO Mindstorms Ev3 - self balancing with reaction wheel
Переглядів 2,6 тис.3 роки тому
LEGO Mindstorms Ev3 - self balancing with reaction wheel
Unicycle balancing robot with reaction wheel (open source)
Переглядів 31 тис.3 роки тому
Unicycle balancing robot with reaction wheel (open source)
Reaction wheel balancing cube. Weight above ground - important.
Переглядів 3,3 тис.3 роки тому
Reaction wheel balancing cube. Weight above ground - important.
About balancing with reaction wheels
Переглядів 9 тис.3 роки тому
About balancing with reaction wheels
Single point balancing with two and with three reaction wheels
Переглядів 251 тис.3 роки тому
Single point balancing with two and with three reaction wheels
Thanks for the great info as always. I've always wondered about something in your videos, can you tell me why there are a few screws missing on the reaction wheel? If it's asymmetrical, does it make it more balanced and faster?
No, the bolts are over. :) And seriously, there shouldn't be more than necessary. The total weight of the cube should be as low as possible...
@@ReMRC oh, thanks!
HI There, Just wondring it this will work the other way around, with the reaction wheels facing upwards? I am in the proecess of building one. I am making a proper PCB and also connecting the brakes up separatly(D12,D23,D26), hoping to get it to jump up...
Are you using current sensing? I tried to make balancing robot with SimpleFOC mini driver it didn't have enough power to bakance. Even without batteries and bigger motors.
I didn't use current sensing.
@@ReMRC I used 2805 140kv motors and also GBM5208-75T similar height as your robot. Mine didn't work not enough torque. I also tried GM4108 motor tried to lift 200gm at 10cm distance wasn't able to lift. Using 12v and 24v no luck. Am I missing something? I used similar code as your's. How are your small motors able to balance. I am using bigger motors but cannot.
@@IMakeRobots I can't figure out what you did wrong...
Hi, can someone tell me where can I get Nidec 24H motors or any alternate motors in India
Also, in esp32 docs, they said the ledcSetup is removed....are you using older version of esp..
As of version 3.0 of ESP32 boards, this function has been changed. Use version 2.0.17.
@@ReMRC I bought a nidec 24h from eBay which has 12 pins...4 feedback, 2 +12V, 2 Gnd, start/stop, Direction, pwm, brake....can I use this?
@@ronaldradnus9108 No. I don't know if it would be possible to use such motors after changing the program.
I noticed it is a 30 pin ESP-32 board, which exact module esp32 30 pin board is it since there are multiple available in the market, the pinout in the schematic also doesnt match most of them
Doesn't matter. The pins are listed on the module.
Hello. This is a great project!!. I am on the process of making it. Could you please provide a link for the magnets you use here (or at least the dimensions)? Thank you!!
As you can see in the video, you can use any small magnets. But poles are important! I.e. must be placed correctly.
Great Improvement!! I see the code and it's cool. Btw, have a few question, Is it based on PID or LQR or both? Just one, I know it is very efficient optimization. And, since this project, I need to know more about the nidec24h motor, I test out a few, like position control, but whenever it reaches the setpoint angle, then if we change the angle a little and hold the motor rotation even in small power, it goes to shutdown. I think this is because of stall current protection. What do you think about this? Thank You.
LQR. NIDEC24h has no position or angle control. It works like a DC motor but with a controller and encoder inside. And yes, it has stall current protection.
Very enlightening. Thanks for the answer Mister.
Can you upload the process of making the controller? Im begginer
This project is too difficult for beginners.
Can you teach me how to write code ? I am from vietnam
No, sorry.
Beautiful, thank you for the 3D printer files, but I think I’ll do the math and code all by myself
@ReM-RC, thanks so much for making this project! I have assembled everything and gone through the calibration. However, the motors don't move and the serial monitor is blank. Any advice of where to start troubleshooting? Do I still need to calibrate the voltage and comment out lines of code for the new build?
Try motors test.
@@ReMRC Thanks for the suggestion. The motor test worked. The issue was that my motors were wired backwards, with the opposite pinout. Luckily nothing was fried. My cube is now working! Thanks a bunch :)
Hi! And thanks for your videos, your projects are amazing! I managed to find all the parts for this build, despite the magnet for position sensor.... Could you help a little bit for this?
www.akm.com/us/en/products/rotation-angle-sensor/tutorial/magnetic-encoder/
Hello, can you please recommend me an engine that is more accessible ?
What is "more accessible"? Ali, Ebay.
Hi, I have a problem, whenever I plug in the battery, or just power the ESP with USB the buzzer keeps beeping no matter what I do, the connections are correct
However, there is probably something wrong with the connections.
@@ReMRC I have a custom pcb, I checked like 20x and all of the connections are connected how they should be, I seriously dont know anymore
@@ReMRC Are you using a PNP or NPN transistor?
@@randomdudeidfk Of course n-p-n. If you use PN2222. I use another one, but it doesn't matter.
@@randomdudeidfk same problem here, buzzer keeps beeping, how did you solved it?
Very nice, congratulations!!! I'm trying to build it, but I have the problem to send the commands by bluetooth. Do you use any application?
Nothing special is needed. Arduino serial monitor or any other program that does the same.
@@ReMRC Thanks, that worked, but I don't know how to follow or what to send, only get this message: first you need to calibrate the balancing points... How can I balance the points?
@@LuisSM ??? ua-cam.com/video/ZU0oTBRDgOE/v-deo.html
@@ReMRC I tried that comma d but nothing happened, maybe I didn't do the process properly, tomorrow I will try again. Thanks and sorry for not noticing that part
@@ReMRC Thanks!, that works :)
maybe reverse steer helpful for turnning
Reverse? What you mean?
@@ReMRCfor example,when you want turn right,first steer to left to make bike roll right .after roll to designated algle center the steer wheel. this might increase the manuverbility
Hi, do you have any github for this project? I have no idea about programming but I want to make self balancing toy Actually I really want to make self balancing hoveroard
Code for this project is currently not available on github.
Is the code setup the same as in the first version?
No, bus all difference you can see in this video.
@@ReMRC Sorry, my bad, I ment as in uploading and setting up the code.
@@KerneIBit Setting the balancing points is different.
@@ReMRC Alright, Thanks!
Nice redesign!
How do I know what motor is 1,2 and 3? I see I can change the pin definitions, so I can swap them without having to resolder :)
Yes. Or watch this ua-cam.com/video/Nkm9PoihZOI/v-deo.html
@@ReMRC aha, the one video I had not seen :) tnx
I must be missing something, how do you attach the motor to the balancing wheel?
How? ua-cam.com/video/ZU0oTBRDgOE/v-deo.html
@ReMRC Oh, a custom part has to go on the shaft to interface with the wheel. Thanks, I hadn't noticed that part before.
@@hummerman85 Custom part? No...
@ReMRC I can not find the file for the black part you have on the motor shaft seen here. I have almost everything and can't wait to finish it. Thank you for putting this together. ua-cam.com/video/ZU0oTBRDgOE/v-deo.html
@@hummerman85 This is part of motor. These motors are sold with this pulley.
Getting all the screws I need finish building mine next week :)
What will happen if you change the direction of one wheel by 90°?
Then there would be no need for EDF. And it would be something like this ua-cam.com/video/-fPYXWaVcOw/v-deo.html
this is awesome. you are awesome! xD
This looks really cool, could you post links to all the parts you used because I looked on amazon and didn't know which one to use.
i found everything except for the motors, does anyone know where i could find some.
@@K1VQ_andRandomStuff aliexpress or ebay.
Hi, I try to do your project but when I turn on the power, the motors are rotatory and stop. I also placed horizontally like your video to check the encoder and it not working. Can you help me? Many thanks.
What is your overall preferences for the motors, either those used in this project, or FOC +BLDC in your balancing triangle?
Nidec24H is an easy way because there is a controller inside. FOC + BLDC can also be used.
Awesome! And thank you for sharing the code. I bought the motors after the first video, but still did not find time to build. This video motivates me to come back to the project.
hey, just wanted to know where you got those motors...
How you are receiving variable 'pwm' values, without magnetic encoder for motor direction control function? is the motor_speed values are fixed in that case?
I use encoder. It works very poorly without it. Don't do that.
1:29 because you need to program the turn to allow the bike to tilt into the turn. basically get the gyro to coordinate with the steering.
Yes... But try to implement it. This is a difficult task...
@@ReMRC I can imagine, it would probably take a bit of time to crack the formula, maybe ChatGPT can help, but lately for the type of code I’ve been trying to make it’s not been doing what I asked it to do… but yeah, have you heard of “single wing planes ✈️ “? They invented this idea where it’s only one wing that controls the steering, thing is to turn when the wing is at high speed the pilot had to manually calculate how to turn on the fly, so it’s a similar concept, you can turn good, but the geometry of it needs to be programmed
Great project, I made your previous design and it was working fine, now that I modified the design with the new gyro plate the cube always slowly falls down as if the reaction wheels can't keep up. Same behavior when balancing on the side or on the corner, any idea what could be causing this? Also why did you remove the code to allow it to balance on all sides? Thanks!
Maybe the encoders are connected badly? Red connections in the schematic.
@@ReMRC Ah yes I got the encoder pins for the motors on my pcb design crossed so I just swapped the pins in software and now it works. Amazing upgrade, so much more stable and the wheels sometimes almost stand still. Is there a reason not to implement standing on all three sides of the cube?
@@sander368 Look at sensor orientation. :) In the first cube I didn't intend to do balancing on the edges. But I did it, although it works badly, and primarily because of the position of the sensor.
there are several model for NIDEC24H. can you tell me the model number or purchase link?
24H404H160
@@ReMRC Thanks a lot
how to calculate the X1, X2, X3 values?
I don't calculate.
What did you change to improve the balancing? Is it just the encoders that makes all the difference? Or did you change the balancing algorithm. It looks so much better!
Encoders have poor resolution. But it helps a little. However, this complicates the algorithm and requires more changes…
@@ReMRC I am using hall sensors instead of encoders. Would the new code improve balancing in this case?
@@nickp7339 Hall sensors with these motors?
@@ReMRC i used Maxon EC flat motors with hall sensors
@@nickp7339 Maxon are very good motors. But very expensive. :) The balancing algorithm needs to know the rotation speed. It doesn't matter what method is used for this.
very gud man 👍
how does the cube finds where its real balance point/angle is ? i guess its not exactly on the imu 0 ?
The balancing point is determined by calibration.
@@ReMRC so it only works if your structure is perfectly symmetrical isnt it ? If your point of balance is changes by an extra mass your motors will saturate?
@@dolevwasser8639 You mean something like this? ua-cam.com/video/aWhKnBbdXs0/v-deo.html
@@ReMRC exactly!!! How ? How do you change your reference angle ?
Can u explain the code in a video please
No, sorry. Code explaining would be time-consuming and uninteresting to most viewers...
Cool! very nice improvements. Nice redesign corner fasteners and no need to use tape anymore. I like the reposition of the mpu6050. The new code and firmware is so much smoother and solid. Keep up the good work and Mahalo for sharing Rem!
Aloha! Glad you liked it.
If I replace triangle and reposition the sensor together with new software only,will there be improvements, or new wheels are mandatory?
You can see both cubes with new software at the end of the video.
@@ReMRC why didn't you include LEDs in scematic and when do LEDs turn on?
@@hunakaka Because the LED connection is very simple. And schematic is completely unnecessary.
now I remember why I subscribed this channel years ago
nidec 24h brushless motor are not available in our country😢 Now what can I do. Is there any alternative way😢❤😊
Where not available? Ebay, Aliexpress always help me.
@@ReMRC Do you have a current link on Aliexpress for the motor? It seems it does not come up (at least not the 24H404H160 version.
@@bi0530 24H404H160 shows exactly that version.
Is it possible to stabilize it with the center of mass misaligned with respect to the fulcrum?
No, center of mass is important.
Any chance you'll make one that can jump into position? Or would that be to expensive?
This is not easy. Why you can see here: ua-cam.com/video/PwZfTrd_3Jg/v-deo.html
is there a way to add a way to modify the code to make the cube tip itself up from a flat at rest position to self balance on an edge or corner? Thanks. Great project.
You mean like this? ua-cam.com/video/PwZfTrd_3Jg/v-deo.html
@@ReMRC Yes! nice. That is doable in this current build? I'm just waiting on the motors to show up. I will make the new print in the meantime.
@@elidelia2653 No, it's hard to make good brakes that always work the same way. It also requires additional space.
@ReMRC 你好,小车制作好之后其中的K1~K4还需要重新调整吗?
now do the pyramid version. tbh this is crazy mix of engineering and coding / modeling etc i could never do that
Hi. I don't understand the physics behind this, is it angular momentum and gyroscope presecion?
Gyroscope precession - no. This is reaction wheel. It works by creating a torque through changing its momentum.
@ReMRC hi. I was reading a bit more yesterday. I believe it works just generating a torque in the wheel opposite to the torque of the weight, is it right?...
@@RGDot422 If you rotating the weight, you get the torque in opposite direction.
Thanks ❤👍🏼🍻
can you share the project files ardunio and stl please
@@carjavitube Yes. Watch another video about cube.